Hoovused
Hoovused on vee suunatud liikumised, mida liikumise suuna järgi jaotatakse hoovusi konvektiivseteks (vertikaalseiks) ja advektiivsteks (horisontaalseiks). Hoovuste tekitajateks on:
• tuuled (tuulehoovused e. triivhoovused)
• vee tiheduse erinevused (tihedus- e. gradienthoovused)
• veepinna kallakus (äravooluhoovused)
• tuuled (tuulehoovused e. triivhoovused)
• vee tiheduse erinevused (tihedus- e. gradienthoovused)
• veepinna kallakus (äravooluhoovused)
|
Järvedes on kõige levinumaks hoovuste liigiks tuulehoovused (Joonis 60). Püsiva ühesuunalise tuule korral kandub soe pinnavesi järve ühte otsa. Vastusena tekib kompensatsioonivool, mis kihistunud järves kulgeb piki termokliini ja kihistumata järves mööda põhja. Tuule suunas kaugemas kaldas veepind tõuseb, tuulealuses langeb. Maa pöörlemise (Coriolise jõu) tõttu ei lange tuule suund ja vee liikumise suund kokku, vaid on pööratud tuule suunast 45 kraadi paremale (Joonis 61). Liikumiskiirus kahaneb sügavusega ning kiirusvektor pöördub põhjapoolkeral järjest paremale, olles lõpuks tuulte suunaga vastupidine.
|
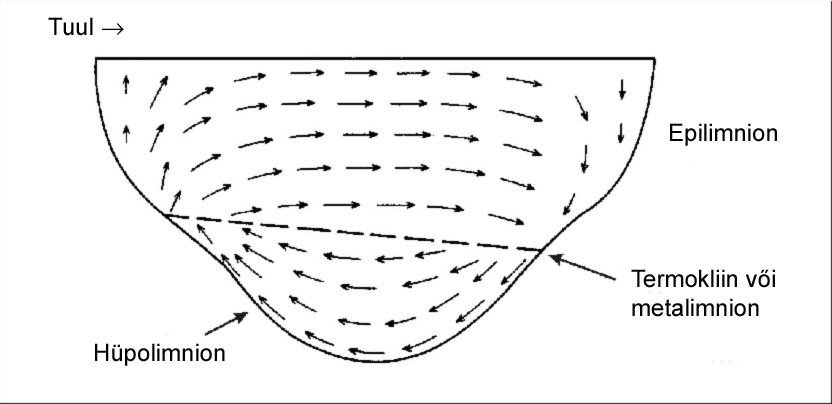
Joonis 60. Tuulehoovuste teke järves
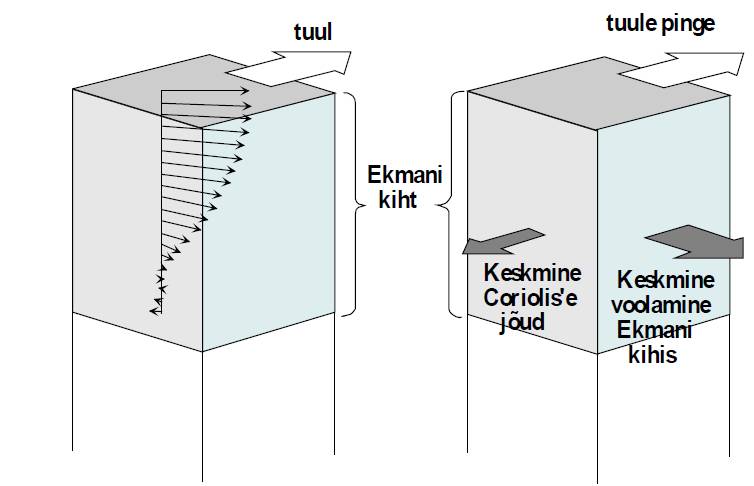
Joonis 61. Ekmani "spiraali" tekkemehanism.
|
Tuulehoovust koos talle vastassuunalise kompensatsioonivooluga nimetatakse Ekmani spiraaliks ja selle tekkepõhjuseks on veekihtide omavaheline hõõrdumine. Pindmine veekiht tõmbab sisehõõrde tõttu liikuma vahetult tema all oleva veekihi. Hõõrdumise tõttu on selle kihi kiirus pisut väiksem pinnakihi kiirusest. Kiiruse suund on aga pisut paremale suunatud võrreldes pinnakihi liikumissuunaga.
Äravooluhoovused on tingitud tavaliselt veetasemete vahest veekogu sisse- ja väljavoolu vahel ning gradienthoovused võivad olla tingitud erinevate veemasside talvistest tiheduse erinevustest. Viimaste põhjuseks võib olla erinev veetemperatuur või soolade sisaldus.
Maailmamere hoovused on oma olemuselt segu gradient- ja tuulehoovustest: ekvaatoril, kus päikesekiired keskpäeval langevad otse ülalt (seniidist) toimub intensiivne vee soojenemine. Soe vesi ei saa jääda "kuhja" vaid voolab ekvaatorilt pooluste suunas laiali, kus pikapeale jahtub. Ekvaatori kohal tekib apvelling. Külm kompensatsioonihoovus liigub põhja pidi vastassuunas - poolustelt ekvaatori poole. Coriolise jõu tõttu hakkab soe hoovus kalduma ida poole (Põhja poolkeral paremale). Maakera pöördub itta. Ekvaatoril liigub kogu veemass koos Maaga ida poole joonkiirusega 1700 km/h. Meie laiuskraadil on idapoole liikumise joonkiirus vaid u. 900 km/h. Järelikult on veemass pidurdunud, kuid inertsi tõttu kaldunud ida poole (püüdnud säilitada oma ekvaatorilt kaasa saadud liikumist).
Maailmamere hoovustesüsteemi tekke kohta vaata alljärgnevat animatsiooni:
Äravooluhoovused on tingitud tavaliselt veetasemete vahest veekogu sisse- ja väljavoolu vahel ning gradienthoovused võivad olla tingitud erinevate veemasside talvistest tiheduse erinevustest. Viimaste põhjuseks võib olla erinev veetemperatuur või soolade sisaldus.
Maailmamere hoovused on oma olemuselt segu gradient- ja tuulehoovustest: ekvaatoril, kus päikesekiired keskpäeval langevad otse ülalt (seniidist) toimub intensiivne vee soojenemine. Soe vesi ei saa jääda "kuhja" vaid voolab ekvaatorilt pooluste suunas laiali, kus pikapeale jahtub. Ekvaatori kohal tekib apvelling. Külm kompensatsioonihoovus liigub põhja pidi vastassuunas - poolustelt ekvaatori poole. Coriolise jõu tõttu hakkab soe hoovus kalduma ida poole (Põhja poolkeral paremale). Maakera pöördub itta. Ekvaatoril liigub kogu veemass koos Maaga ida poole joonkiirusega 1700 km/h. Meie laiuskraadil on idapoole liikumise joonkiirus vaid u. 900 km/h. Järelikult on veemass pidurdunud, kuid inertsi tõttu kaldunud ida poole (püüdnud säilitada oma ekvaatorilt kaasa saadud liikumist).
Maailmamere hoovustesüsteemi tekke kohta vaata alljärgnevat animatsiooni:
